BAUMAN MOSCOW STATE TECHNICAL UNIVERSITY
|
DMITROV BRANCH
REGISTRATION & LOG IN
Log in
Registration
Password reset
Log out
GENERAL INFORMATION ON HST
Principle of operation
Configuration
Real-time simulation system
Man-machine interface control panel simulator
The industrial Kawasaki robot
TV-system
SPACE MANIPULATION ROBOT CONTROL
Control frames of reference
Frames, fixed relative to ISS
Connected with robot frames
Connected with base point frames
Linear and angular coordinates
Motion control commands
Free motion commands
Nearby base points motion commands
Contact operations
HST REMOTE CONTROL
Method of a remote experiment
Remote control scheme
Remote control interface
Generating a robot mission
RUN REMOTE EXPERIMENT
CONTACT INFORMATION
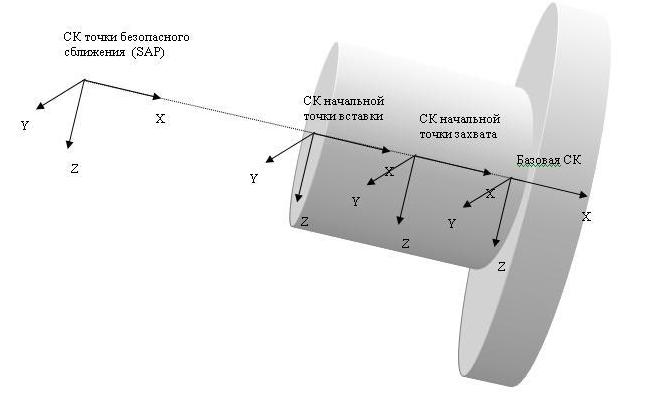
Connected with base point frames
There are 4 frames, connected with base points:
Basic frame (BAF);
Frame of first grapple point;
Frame of initial inserting point;
Frame of safety approach.